Bayesian Inference (geobrain.bayes)#
The bayes module provides gradient-informed sampling methods for uncertainty
quantification in geophysical inverse problems.
Overview#
Rather than finding a single “best” model, Bayesian inference characterizes the full posterior distribution of model parameters, providing uncertainty estimates that are critical for decision-making.
GeoBrain provides four samplers, all supporting automatic differentiation through the forward model:
Sampler |
Method |
Best For |
|---|---|---|
|
Stein Variational Gradient Descent |
Multi-modal posteriors, large ensembles |
|
Hamiltonian Monte Carlo |
High-dimensional with tuned step size |
|
No-U-Turn Sampler |
Auto-tuned HMC |
|
Langevin Dynamics (ULA/MALA) |
Simple gradient-based sampling |
SVGD (Stein Variational Gradient Descent)#
SVGD maintains an ensemble of particles that are iteratively transported to approximate the posterior distribution:
from geobrain import InverseProblem, SVGD, Posterior, Gaussian
import torch
# Define problem
problem = InverseProblem(
forward_fn=forward,
observed=data,
noise_std=0.01,
)
# Define prior (Gaussian takes mean tensor and covariance matrix)
prior = Gaussian(mean=m_prior, cov=500.0**2 * torch.eye(n_params))
# Create posterior
posterior = problem.as_posterior(log_prior=prior.log_prob)
# Run SVGD
svgd = SVGD(target=posterior, lr=0.005)
result = svgd.run(
n_samples=50, # Number of particles
n_steps=1000, # Number of iterations
)
# Access results
mean_model = result.samples.mean(dim=0) # Ensemble mean
std_model = result.samples.std(dim=0) # Ensemble standard deviation
samples = result.samples # All particles [n_samples, dim]
print(result.summary())
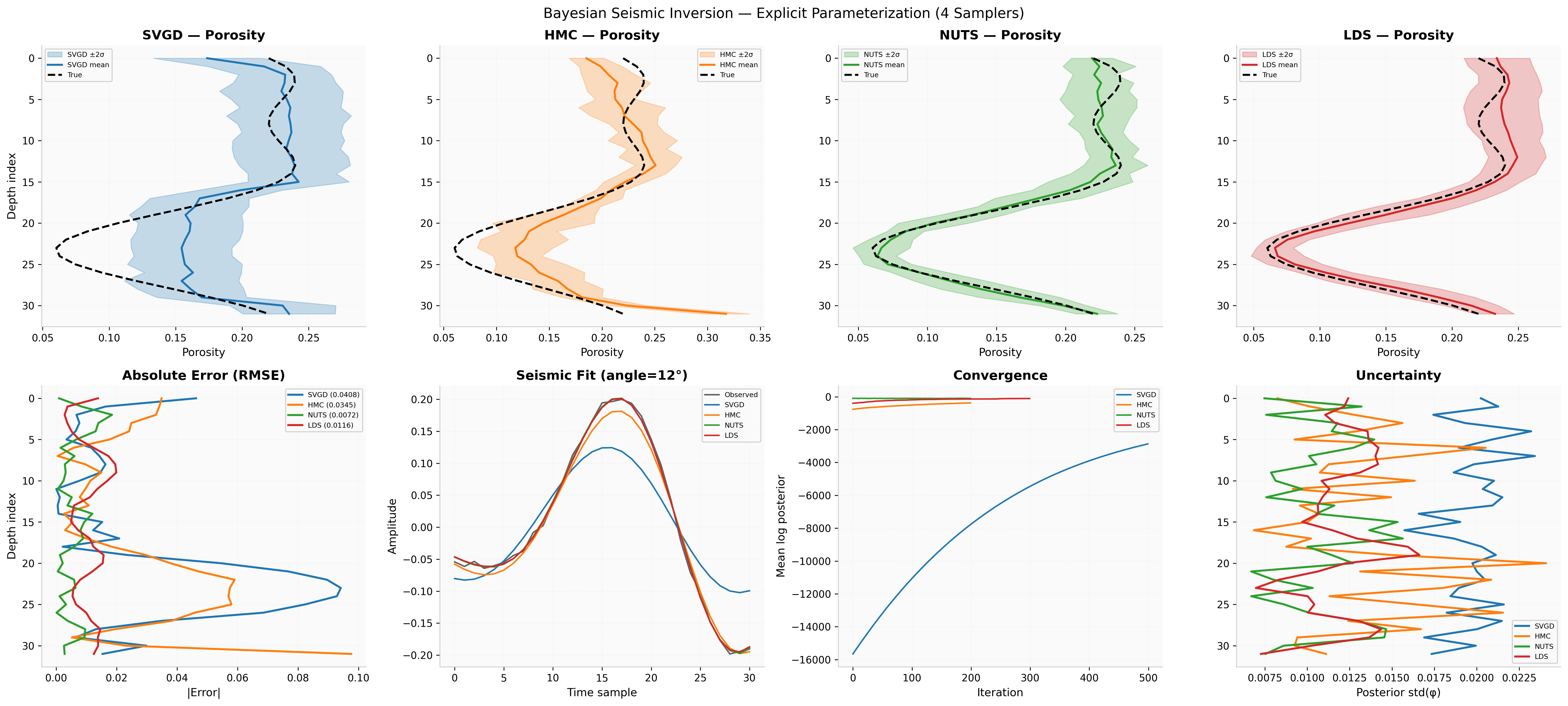
Fig. 25 Bayesian AVO inversion: posterior mean and uncertainty from four samplers.#
Distributions#
Gaussian#
Multivariate Gaussian parameterized by mean vector and covariance (or precision) matrix:
from geobrain import Gaussian
import torch
# Isotropic Gaussian
mean = torch.zeros(10)
cov = torch.eye(10)
prior = Gaussian(mean=mean, cov=cov)
# Or with precision matrix
prior = Gaussian(mean=mean, precision=torch.eye(10))
log_p = prior.log_prob(samples) # [batch, 1]
score = prior.score(samples) # [batch, dim]
drawn = prior.sample(100) # [100, dim]
Gaussian Mixture#
from geobrain import GaussianMixture
import torch
prior = GaussianMixture(
means=[torch.tensor([2000.0]), torch.tensor([3000.0])],
covs=[torch.tensor([[90000.0]]), torch.tensor([[160000.0]])],
weights=torch.tensor([0.6, 0.4]),
)
Custom Posterior#
from geobrain import Posterior
posterior = Posterior(
log_likelihood=log_likelihood_fn,
log_prior=log_prior_fn,
data=d_obs,
dim=n_params,
)
Kernels#
Kernels measure particle similarity for SVGD repulsion:
from geobrain import RBFKernel, IMQKernel
kernel = RBFKernel() # Radial Basis Function (default)
kernel = IMQKernel() # Inverse Multi-Quadratic
Hamiltonian Monte Carlo (HMC)#
from geobrain.bayes import HMC
hmc = HMC(
target=posterior,
step_size=1e-5,
n_leapfrog=20,
adapt_step_size=True,
target_accept_rate=0.65,
)
result = hmc.run(
n_samples=10,
n_steps=300,
initial_samples=init_samples,
n_burnin=100,
)
No-U-Turn Sampler (NUTS)#
from geobrain.bayes import NUTS
nuts = NUTS(
target=posterior,
target_accept_rate=0.65,
max_tree_depth=10,
)
result = nuts.run(
n_samples=10,
n_steps=300,
initial_samples=init_samples,
n_burnin=100,
)
Langevin Dynamics Sampler (LDS)#
Supports both Unadjusted Langevin Algorithm (ULA) and Metropolis-Adjusted Langevin Algorithm (MALA):
from geobrain.bayes import LDS
lds = LDS(
target=posterior,
step_size=1e-5,
use_mh_correction=True, # MALA (False for ULA)
adapt_step_size=True,
target_accept_rate=0.574,
)
result = lds.run(
n_samples=50,
n_steps=500,
initial_samples=init_samples,
n_burnin=200,
)
SamplingResult#
All samplers return a SamplingResult dataclass:
result.samples # Final samples [n_samples, dim]
result.log_prob_history # Mean log prob per step
result.algorithm # Algorithm name string
result.n_steps # Steps completed
result.total_time # Wall time (seconds)
result.summary() # Formatted text summary
result.to_dict() # Serializable dictionary
result.to_numpy() # Samples as numpy array
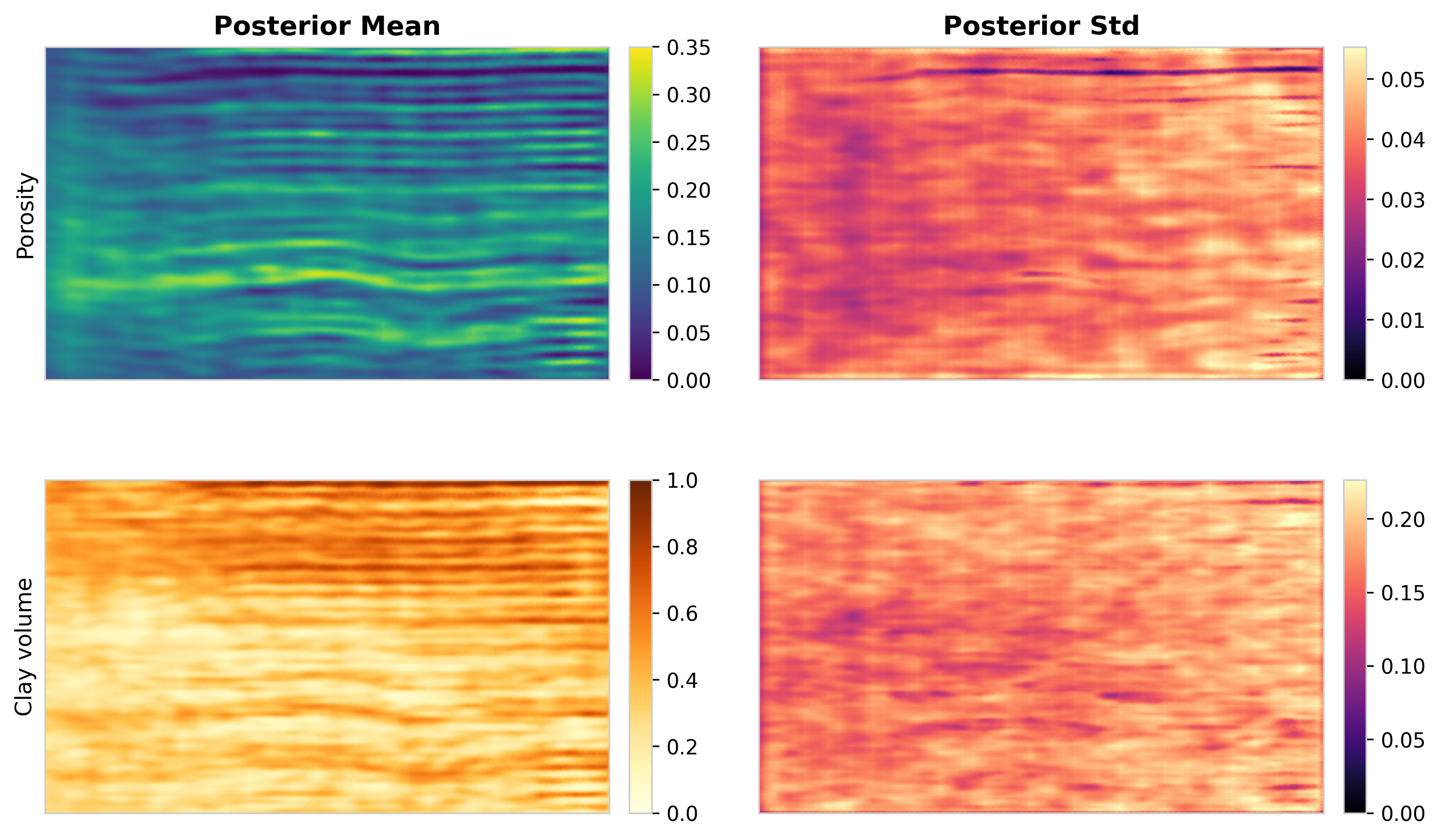
Fig. 26 IBDP case study: posterior mean and standard deviation of porosity.#
Utility Functions#
from geobrain.bayes import pairwise_distances, median_heuristic, mmd, energy_distance
# Compute MMD between two sample sets
distance = mmd(samples_p, samples_q)